


Робот-пылесос своими руками
Обзоры проектов победителей
Автор проекта: Николай Сахаров (15 лет), Вологодская область, ЦМИТ «Современные машиностроительные технологии».
Один из победителей сезона конкурса ШУСТРИК 2022–2023 гг.
Николай выбрал задание «7.2. Полезный домашний девайс» от компании «PICASO 3D»:
«Разработай нестандартный дизайн бытовой техники. Продумай внутреннее устройство и сделай модель».
Комментарий экспертов о проекте:
«Технически сложный и законченный проект робота-пылесоса. Работоспособность показана на видео процесса уборки мусора.
Несмотря на наличие большого числа аналогов, разработчику пришлось самостоятельно пройти несколько этапов:
➣ начиная от проектирования робота-пылесоса,
➣ выбора необходимых компонентов и материалов,
➣ до программирования алгоритмов определения местоположения и маршрута в помещении.
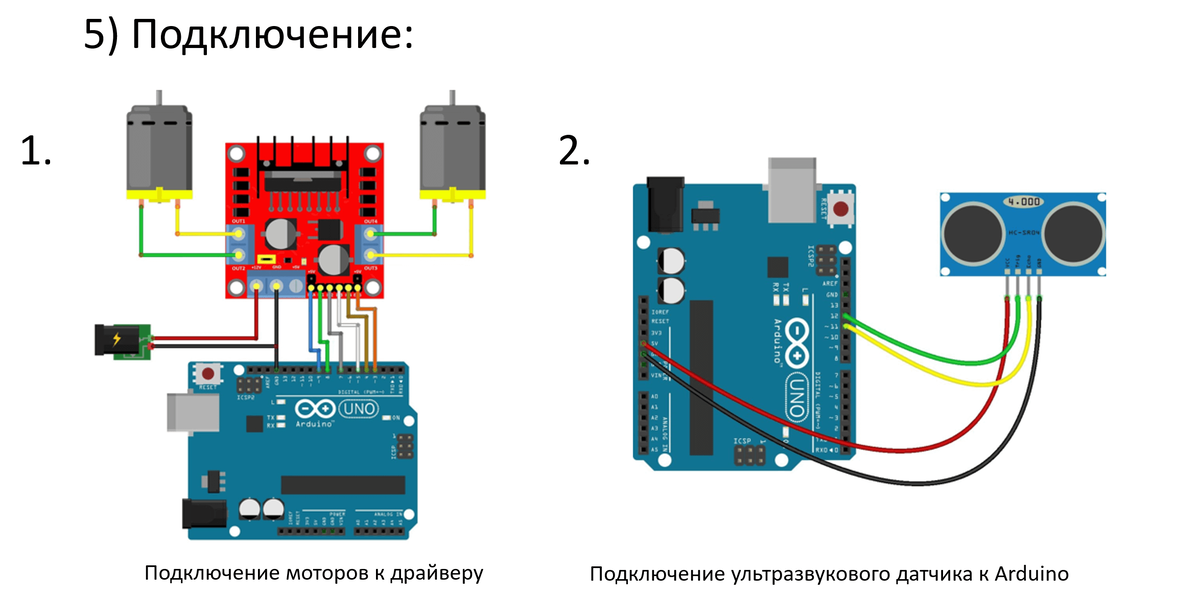
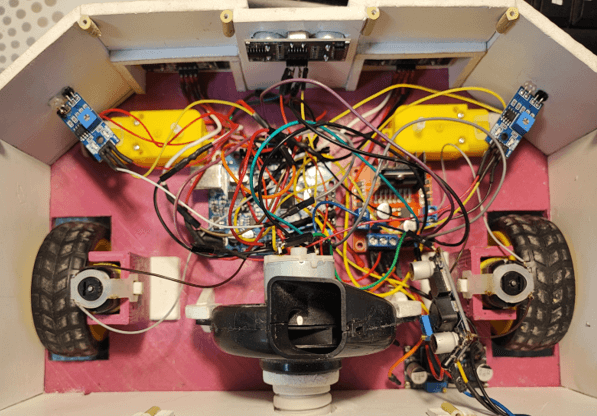
Основная платформа модели напечатана на 3D-принтере, внутри располагаются двигатели, аккумулятор и управляющая электроника на основе микроконтроллера Arduino Uno.
Для обнаружения мусора используются ультразвуковые и инфракрасные датчики, в зависимости от показаний которых робот корректирует траекторию своего движения. В конструкции предусмотрен отдельный отсек, чтобы собранный роботом мусор можно было легко вытряхнуть».
Далее приводим ряд слайдов и описание из презентации Николая




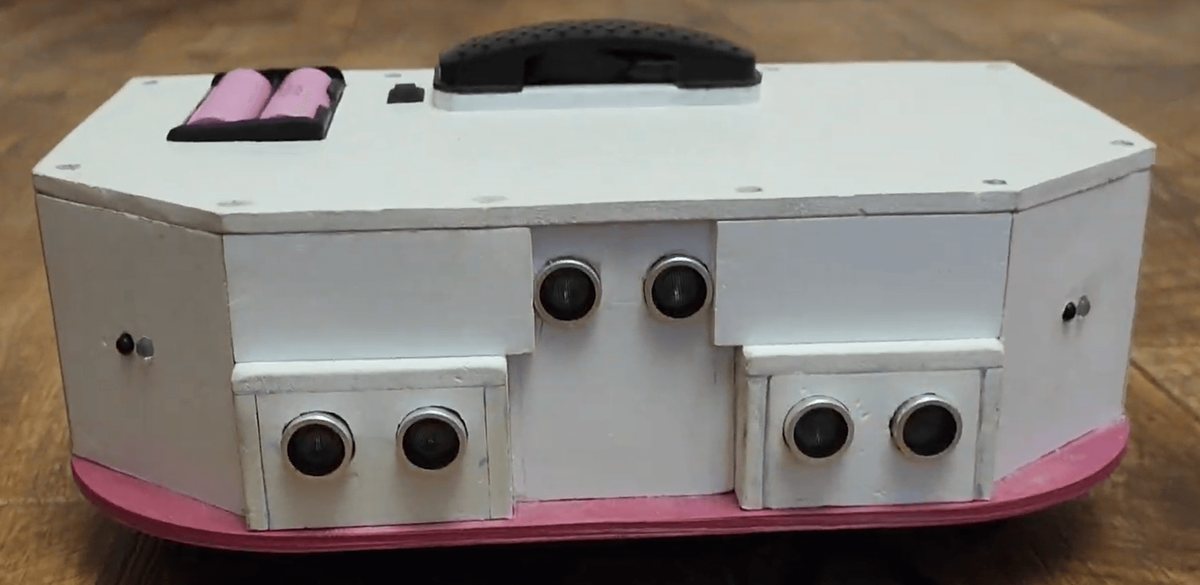
Контейнер и платформа
«Основная платформа модели напечатана на 3D принтере. Остальные детали сделаны вручную из ПВХ пластика. Контейнер для сбора мусора разделён на три сегмента: фильтр, отсек для контейнера и сам контейнер. Это сделано для того чтобы, собранный роботом мусор можно было легко вытряхнуть, не поднимая при этом робота».

Контейнер и платформа
«Основная платформа модели напечатана на 3D принтере. Остальные детали сделаны вручную из ПВХ пластика. Контейнер для сбора мусора разделён на три сегмента: фильтр, отсек для контейнера и сам контейнер. Это сделано для того чтобы, собранный роботом мусор можно было легко вытряхнуть, не поднимая при этом робота».
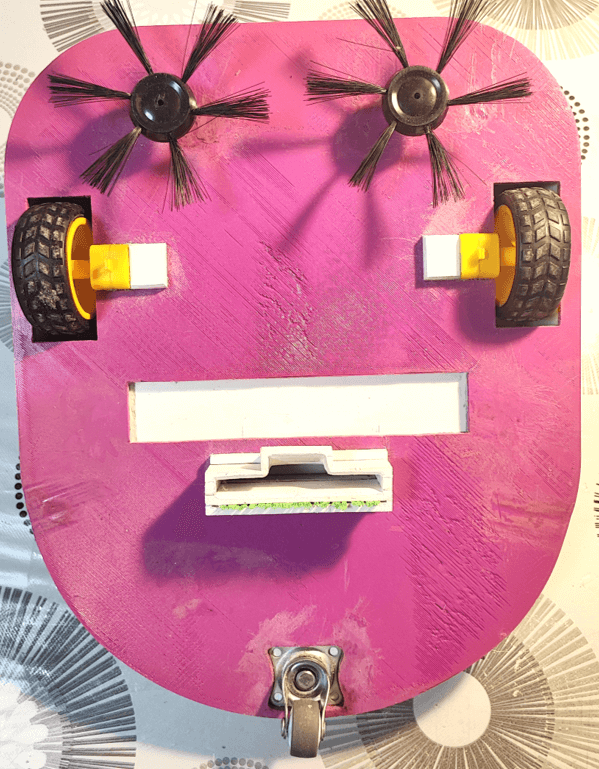
Расположение моторов
«Двигатели расположены на передней части робота. На задней части закреплено всенаправленное колёсико. Эта конструкция была выбрана для большей манёвренности по сравнению с другими. Изначально на модели был закреплён вал-щётка который впоследствии исследования был снят из-за ненадобности и ухудшения работы всей конструкции».
Расположение моторов
«Двигатели расположены на передней части робота. На задней части закреплено всенаправленное колёсико. Эта конструкция была выбрана для большей манёвренности по сравнению с другими. Изначально на модели был закреплён вал-щётка который впоследствии исследования был снят из-за ненадобности и ухудшения работы всей конструкции».
Сбор мусора
«Передние щётки продвигают мелкий мусор и пыль к всасывателю. Далее через гофрированную трубку воздух продвигается к вентилятору засасывая мусор, который не попадает в трубку из-за фильтра. Принцип можно было доработать ещё одной щёткой, но в процессе конструирования выяснилось что она будет только мешать сбору мусора».

Сбор мусора
«Передние щётки продвигают мелкий мусор и пыль к всасывателю. Далее через гофрированную трубку воздух продвигается к вентилятору засасывая мусор, который не попадает в трубку из-за фильтра. Принцип можно было доработать ещё одной щёткой, но в процессе конструирования выяснилось что она будет только мешать сбору мусора».
Движение
«Для предотвращения «зацикливания» робота в программе используются переменные-таймеры, которые следят за тем, сколько раз робот выполнил то или иное действие и если таймер превысит какое-то значение, то робот автоматически развернётся и будет следовать дальнейшим указаниям программы».
Движение
«Для предотвращения «зацикливания» робота в программе используются переменные-таймеры, которые следят за тем, сколько раз робот выполнил то или иное действие и если таймер превысит какое-то значение, то робот автоматически развернётся и будет следовать дальнейшим указаниям программы».
«Траектория движения робота довольно проста: он едет вперёд пока не увидит препятствие далее в зависимости от того, какими датчиками обнаружилась преграда происходит разворот, объезд препятствия или движение назад».
«Траектория движения робота довольно проста: он едет вперёд пока не увидит препятствие далее в зависимости от того, какими датчиками обнаружилась преграда происходит разворот, объезд препятствия или движение назад».
Также Николай приводит список навыков, задействованных в работе над проектом:
➣ Знание основ электроники и механики — понимание основных принципов работы электронных компонентов.
➣ Программирование — умение работать с языками программирования.
➣ Дизайн — навыки работы с 3D-моделированием.
➣ Организационные навыки — управление ресурсами временем и бюджетом.
➣ Креативность — гибкость при нахождении решений.
➣ Системное мышление — разработка и тестирование алгоритмов управления.
И список планируемых доработок:
➣ Планируется доработать траекторию движения, для того чтобы она стала более прямолинейной.
➣ Также требуется поставить более мощный вентилятор для забора воздуха.
➣ Упростить конструкцию по сбору мусора и применить вал-щётку.
➣ Для усовершенствования определения препятствий нужно установить лидар, который будет сканировать местность.
➣ Пересмотреть расположение некоторых частей робота.

© Всероссийский конкурс ШУСТРИК 2013‑2026 гг.
(школьник, умеющий строить инновационные конструкции)
 ㅤ
ㅤ
авторизуйтесь