


Робот-спасатель «VBOT».
Обзоры проектов победителей
Дорогие друзья!
Продолжаем знакомить вас с проектами-победителями сезона конкурса ШУСТРИК 2021–2022 гг.: Дмитрий Торопов (15 лет) и Арсен Гаджиев (15 лет) представили прототип робота-спасателя «VBOT» (Ростовская область, город Новочеркасск).
Наставники: Мозговой Владимир Владимирович и Порядина Елизавета Андреевна.
Площадка: Центр технического творчества «RoboGrade» г. Новочеркасск.
Ребята выбрали направление «Апгрейд»*, чтобы улучшить свой проект с предыдущего сезона. Задание выглядело так:
«4.2. Универсальный робот-разведчик. Представь ситуацию — случилось стихийное бедствие или авария, под завалами остались люди. Предложи проект универсального робота-разведчика. Робот должен быть малогабаритный, должен обладать достаточной проходимостью, может быть применен для исследования различных шахт, узких труб, канализации, нор, лазов в пещерах, разведки под завалами горной породы и зданий, куда большой человек не может проникнуть. При обнаружении человека робот должен передать сигнал спасателям».
* Направление «Апгрейд» позволяет подать прошлогодний проект, обязательно с подробным описанием того, что изменилось с прошлого года. Эксперты оценивают именно количество и важность внесенных изменений в проект.
В итоге ребята переделали абсолютно все, осталась только изначальная идея:
💬 «Самое главное что было изменено, так это главный редуктор изгиба корпуса робота. Данный редуктор планетарный и коэффициент редукции в нем 1:64. Было принято решение: изготовить два таких редуктора, в котором коэффициент редукции составит 1:128. Редукторы приводят в действие два шаговых двигателя NEMA 17».

💬 «Существенно была изменена опорная часть робота, а именно секции удлинения и укорачивания. Вместо того, чтобы алюминиевый профиль скользил на имитированных подшипниках скольжения, были использованы ролики посаженные на подшипники. Также была увеличена ширина робота».

💬 «Изменена ходовая часть робота. Были увеличены колеса до 125 мм в диаметре. Для большей прочности поставлены на ось колес два подшипника, сделанные на 3D-принтере».

💬 «Для робота был изготовлен пульт управления.
Корпус пульта был напечатан на 3D-принтере, но поскольку напечатанные детали имеют не совсем идеальную поверхность, было решено использовать шпаклёвку, методом шлифования довести корпус до приближенного к идеалу поверхности, затем были нанесены два слоя грунтовочной краски, после отверждения которой снова были нанесены три слоя краски».





💬 «Схема робота и пульта управления была выполнена в программе EasyEDA. Всей электроникой в роботе управляет плата ARDUINO MEGA 2560. Пульт робота работает на базе платы ARDUINO NANO».

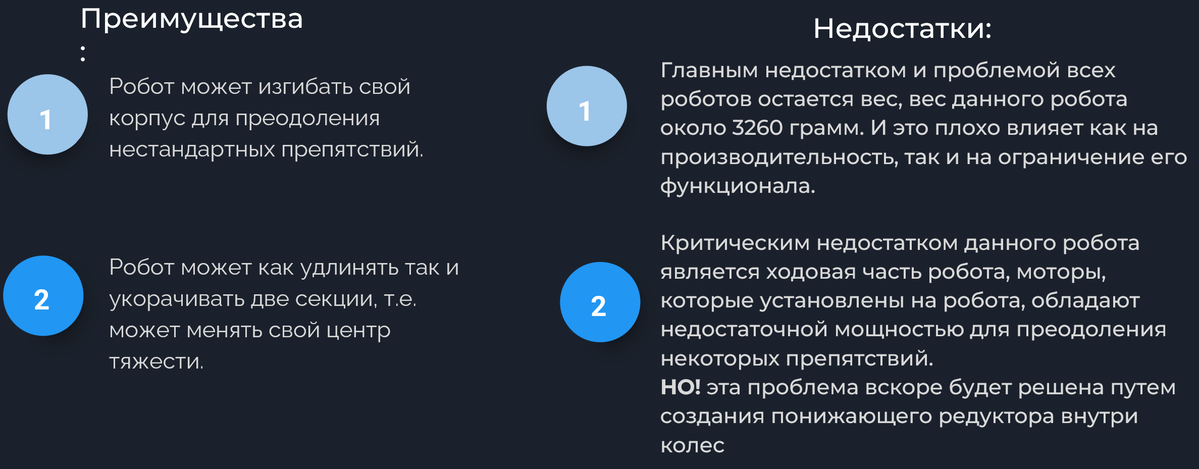
Также ребята расписали преимущества и недостатки своего робота.
И наметили дальнейшее его улучшение.
Желаем Дмитрию и Арсену удачи в дальнейшем продвижении своего проекта!

© Всероссийский конкурс ШУСТРИК 2013‑2026 гг.
(школьник, умеющий строить инновационные конструкции)
 ㅤ
ㅤ
авторизуйтесь