


Перчатка для виртуальной реальности с тактильной обратной связью HapticGlove
Обзоры проектов победителей

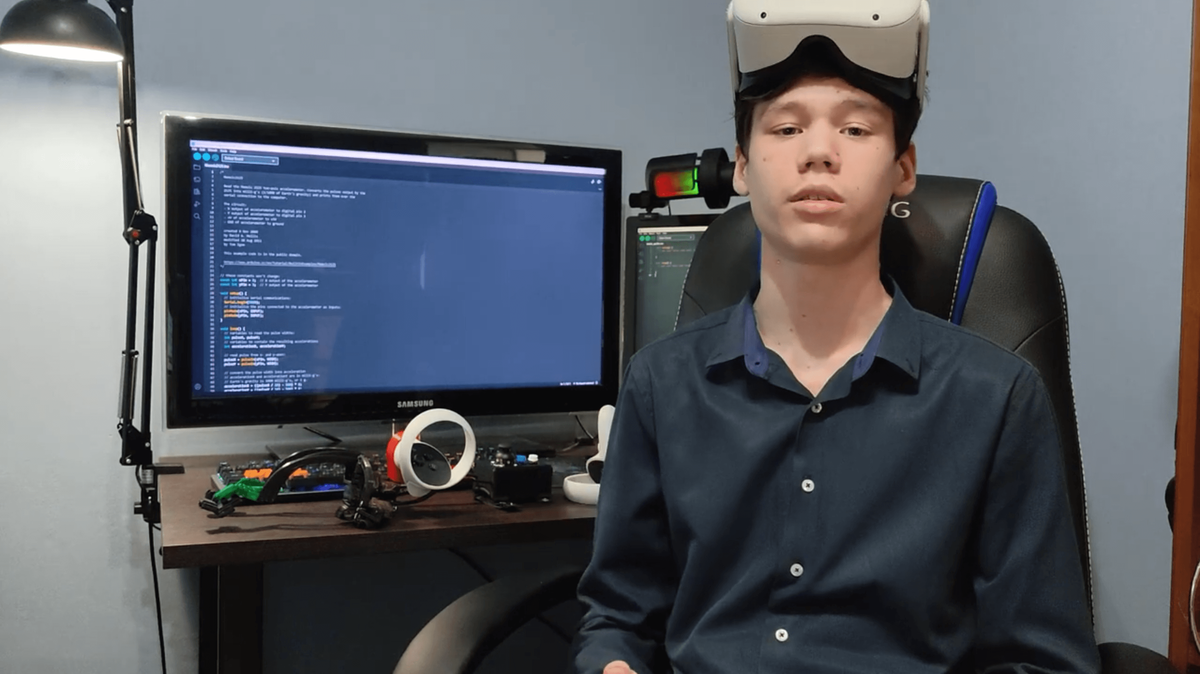
Автор проекта: Дмитрий Торопов (16 лет), Центр технического творчества RoboGrade, г. Новочеркасск.
Наставник: Мозговой Владимир Владимирович.
Один из победителей сезона конкурса ШУСТРИК 2022–2023 гг.
Дмитрий выбрал задание от компании Роббо: «5.1. Устройство на базе технологии Интернета вещей, чтобы сделать жизнь проще, удобнее и безопаснее».
«Интернет вещей (Internet of Things или IoT) достаточно быстро входит в повседневную жизнь человека. Умная колонка уже умеет включать чайник, отопление на даче мы включаем через смартфон, и даже стиральной машиной можно управлять удаленно. Потенциально IoT может упростить и повысить качество жизни наиболее уязвимой части человечества — инвалидам и пожилым людям».
Краткое описание:
«Проект представляет собой гарнитуру для виртуальной реальности, которая дает возможность получить тактильные ощущения, прикасаясь к объектам виртуальной реальности».
Такая перчатка может быть полезна:
- В хирургии,
- для спортивных тренировок,
- для игр в виртуальной реальности.
«Представим что вы высококвалифицированный хирург и вам нужно срочно провести операцию в месте которое в тысячи километров от вас. Благодаря скоростному интернету, перчатке ВР и шлему ВР можно удаленно проводить операцию с помощью робота. Перчатка хирургу позволить ощущать прикосновения и не давая сжать руку есть робот что то держит».
Интересный факт: около 4 лет назад в сети активно распространялись видео, в которых люди использовали возможности VR-игры «Half-Life: Alyx» для игры на пианино. А учителя математики вели свои уроки в необычном игровом пространстве для того, чтобы вносить разнообразие в обучающий процесс (см. видео ниже). С такой перчаткой, которую разработал Дмитрий, управление было бы еще удобнее, а погружение еще качественнее.
Комментарий экспертов о проекте:
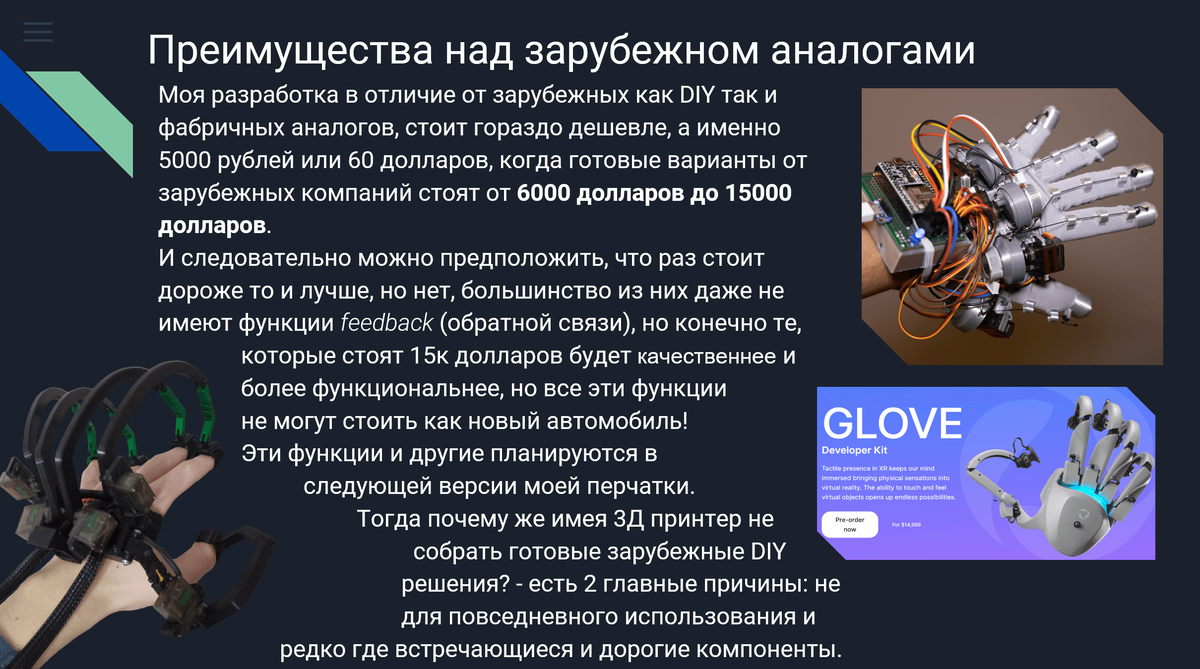
«Автор поставил цель разработать перчатку для виртуальной реальности с возможностью обратной связи. Для универсальности предусмотрена возможность использования перчатки для рук разных размеров. Показан процесс 3D-моделирования и 3D-печати деталей, электрическая схема, способ отслеживания перчатки в пространстве. Проведено сравнение с импортными дорогостоящими аналогами и выделены преимущества над ними (функция обратной связи и низкая себестоимость компонентов)».
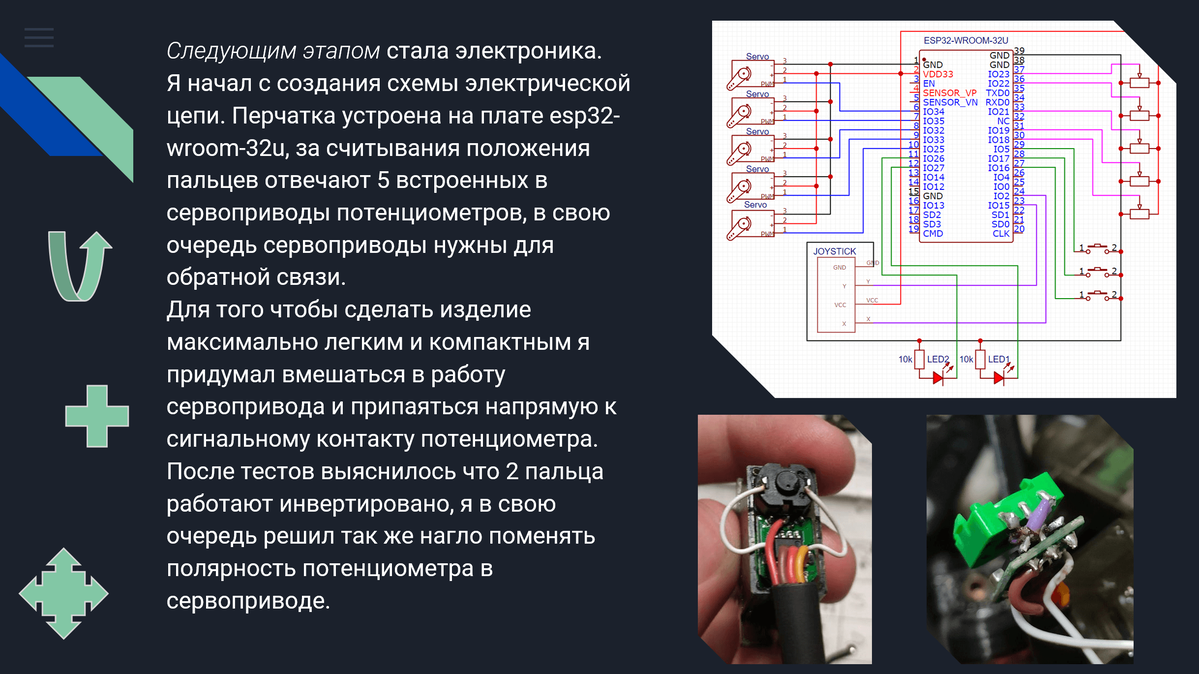
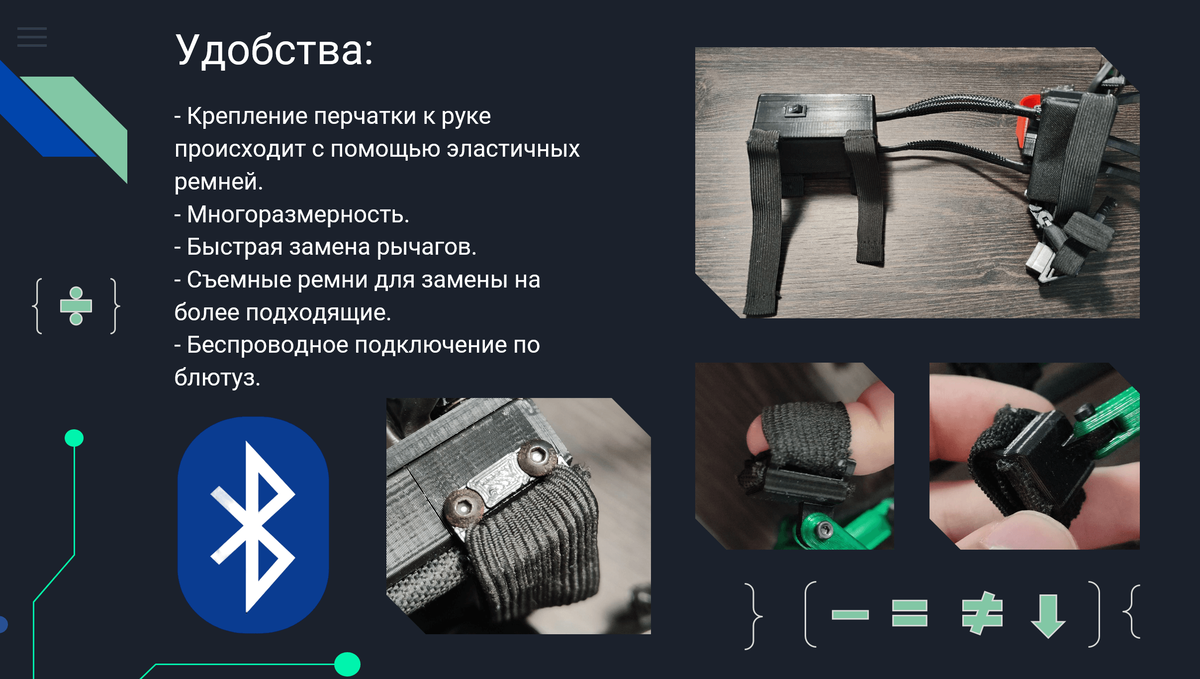
Далее приведем несколько слайдов, на которых Дмитрий рассказывает о процессе создания проекта:



Также отметим слайд о сравнении данного устройства с аналогами:
В завершение рекомендуем к просмотру видео, в котором принцип работы перчатки показан еще более наглядно:

© Всероссийский конкурс ШУСТРИК 2013‑2026 гг.
(школьник, умеющий строить инновационные конструкции)
 ㅤ
ㅤ
авторизуйтесь