


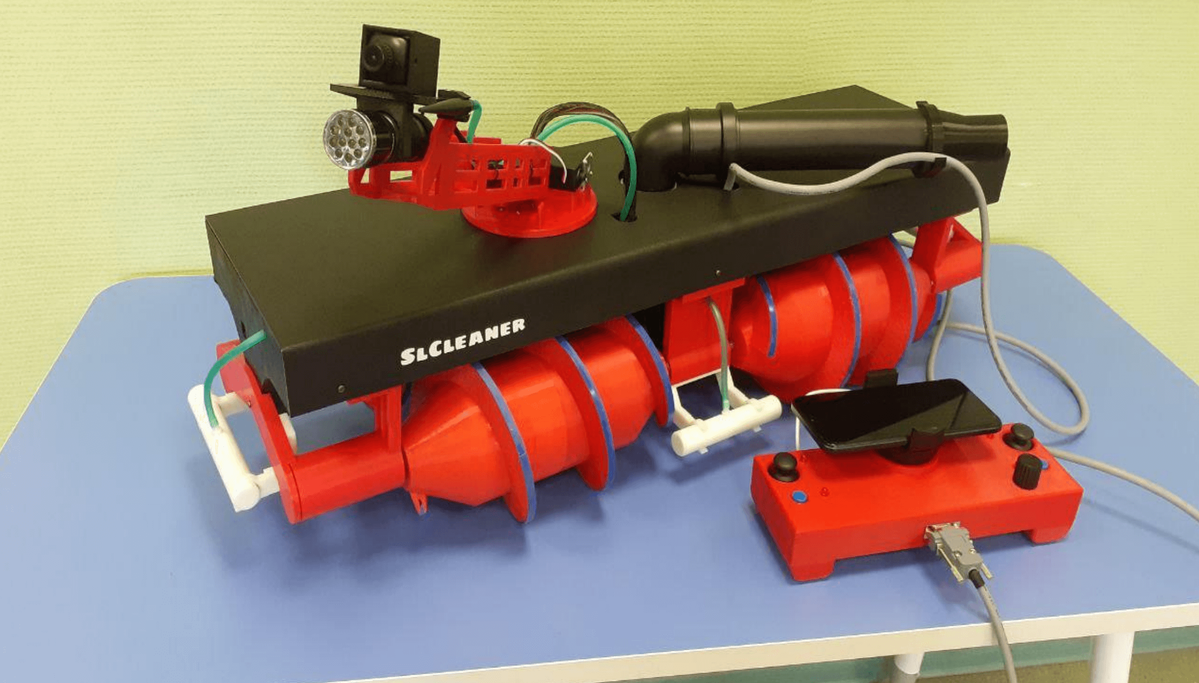
Робот-чистильщик нефтехранилищ SLCleaner
Обзоры проектов победителей
Авторы проекта: Михаил Быстров (16 лет), Егор Яценко (16 лет) и Юрий Патякин (15 лет), Самарская область, детский технопарк «Кванториум-63 регион».
Наставник: Новиков Валерий Михайлович.
Одни из победителей сезона конкурса ШУСТРИК 2022–2023 гг.
Ребята выбрали задание «9.2. Робот-помощник» от компании «PICASO 3D»:
«Разработай концепцию и создай прототип своего робота-помощника. Робот может помогать в любой сфере: от выполнения работы по дому — до помощи в тушении пожара. Фантазии нет предела, а вариантам полезных девайсов – числа».
Суть проекта:
«В нефтедобывающей промышленности при очистке нефтяных резервуаров широко применяются ручные и маломеханизированные технологии. Однако данные методы имеют существенные недостатки, связанные с промышленной и экологической безопасностью, вредным воздействием углеводородов на здоровье людей, производящих очистку резервуаров, а также низкой технологической эффективностью. Наша команда создала автоматизированного робота, помогающего очищать нефтехранилища от шлама».
Комментарий экспертов о проекте:
«Проект выделяется оригинальностью назначения и конструкции, а также впечатляет своими габаритами (созданный прототип почти метр длиной). Интересна потенциальная возможность применения в нефтяной отрасли при соответствующей доработке.
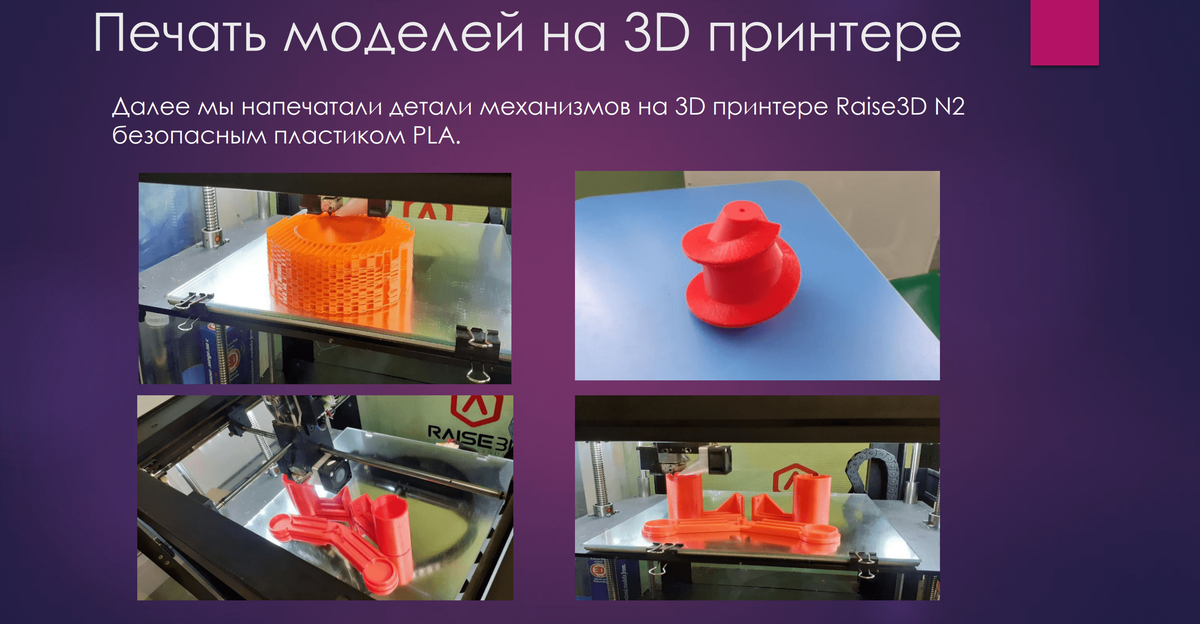
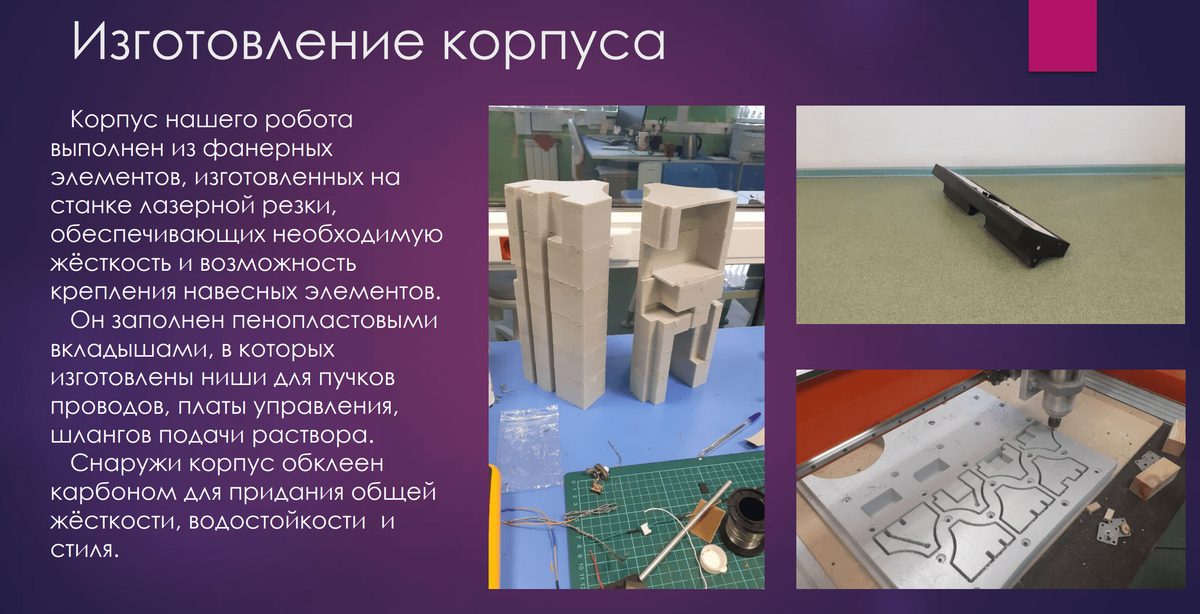
Подробно показан весь процесс изготовления, включая 3D-моделирование и 3D-печать составных частей, лазерную резку, программирование Arduino. Авторы проекта провели тестирование и засняли на видео процесс работы прототипа в режиме черновой уборки, где в качестве шлама использовались опилки от дерева».
Сперва ребята приводят примеры аналогов, анализируют их плюсы и минусы:

После этого приводится список особенностей и преимуществ разработанного проекта:
«Изучив конструкции аналогичных роботов и определив их достоинства и недостатки, мы спроектировали и создали свой ходовой прототип, который, по нашему мнению, обладает рядом преимуществ перед аналогами:
➣ Замена гусеничного хода на двигатель, состоящий из 4 шнеков.
➣ Снятие ограничения по высоте слоя шлама.
➣ Применение шнеков так же значительно упрощает процедуру очистки робота по окончанию работ.
➣ Значительное улучшение маневренности аппарата и упрощение работы оператора с ним.
➣ Включение передних и задних шнеков навстречу друг другу будет способствовать перемещению суспензии, состоящей из шлама, воды и химического реагента к центру робота, где находится сопло для ее откачки».
У робота предусмотрено три режима уборки:
1. Во время черновой уборки робот просто стоит на месте со включенными шнеками, которые гонят весь шлам в середину, где в свою очередь установлено всасывающие сопло, а также на боковые и передние сопла подаётся водный раствор с реагентами.
2. При чистовой обработке шнеки начинают работать как колеса. Робот перемещается по дну емкости и собирает оставшуюся жидкость после черновой очистки. В это время также подается водный раствор под давлением.
3. В третьем режиме уборки робот может перемещаться по поверхности шлама во всех направлениях, что позволяет ему включать черновой режим уборки в любой точке резервуара, а также с легкостью смывать остатки шлама со стенок.
Далее ребята рассказывают об этапах создания прототипа:



Приведена информация об экономическом обосновании и целесообразности использования данного проекта:
➣ Более высокая производительность работы по очистке РВС и уменьшение затрат на очистку самого робота.
➣ Сокращение времени простоя резервуаров, в том числе и за счет увеличения срока между очередными очистками.
➣ Существенное снижение, либо полное исключение расходов на устранение последствий профессиональных заболеваний персонала, занятого на очистке ёмкостей.
Также отметим важные итоговые разделы презентации:
➣ Полученные навыки.
➣ Характеристики прототипа.

В конце работы приводится информация о тестировании прототипа и ссылка на видео:
«По итогам тестирования робот выполнил все поставленные задачи, а именно прекрасно отработал режим черновой уборки, где в качестве шлама мы использовали опилки от дерева. Также робот прошел проверку в режиме чистовой уборки на ровном полу.
Но с рядом достоинств есть и незначительные недостатки тестирования. К сожалению, мы не смогли наглядно проверить как робот может перемещаться на шнеках во всех направлениях, так как поверхность, на которой мы тестировали робота, была не предназначена для некоторых из направлений. Но аналогичные машины на шнековом ходу показывали отличную проходимость и плавучесть в условиях вязкой жидкости».

© Всероссийский конкурс ШУСТРИК 2013‑2026 гг.
(школьник, умеющий строить инновационные конструкции)
 ㅤ
ㅤ
авторизуйтесь