


Автономная подводная лодка.
Обзоры проектов победителей

Дорогие друзья!
Продолжаем знакомить вас с проектами-победителями сезона конкурса ШУСТРИК 2021–2022 гг.: Чернякова Юлия (13 лет) и Черняков Александр (10 лет) представили модель автономной подводной лодки (город Саратов).
Наставник: Харламов Александр Владимирович.
Площадка: МАОУ «Лицей математики и информатики» г. Саратов.
Ребята выбрали направление «Судостроение» с заданием 8.2. Подводная лодка:
«Разработай конструкцию подводной лодки с возможностью управления всплытием и погружением аппарата. Желательно, чтобы установка могла управляться дистанционно и была способна вмещать в свой корпус «полезный груз».
Особое внимание ребята уделили конструктивным особенностям, позволяющим лодке погружаться и всплывать с минимальными затратами энергии.
💬 «Навыки постройки летательных аппаратов позволили нам получить знания о поведении крыла в воздухе. Изменение плавучести лодки около нейтрального значения от положительной к отрицательной, а также от отрицательной к положительной плавучести, в сочетании с изменением угла поворота крыла, позволяет погружаться и всплывать под наиболее оптимальным углом».
Изменение плавучести и центра тяжести происходит за счет отдельного «модуля плавучести», показанного ниже.


Благодаря принципу модуля плавучести с поршнями внутри лодка имеет различные варианты погружения и всплытия. Например, для режима вертикального погружения:
💬 «Поршни модуля плавучести приводятся в движение при помощи резьбовой шпильки и симметрично смещаются к краям модуля плавучести, в отверстие по центру модуля проникает вода и заполняет пространство между поршнями, уменьшая объем модуля погружения. При этом поршни сдавливают воздух, временно уменьшая его объем. Плавучесть лодки уменьшается, и она переходит в стадию вертикального погружения. Пространство между разведенными в стороны поршнями на данном этапе заполнено забортной водой».




💬 «Система управления погружением и всплытием работает под управлением бортового компьютера. Микрокомпьютер отслеживает данные с 6-осевого магнитометра-гироскопа и в реальном времени корректирует положение рулей направления, ориентируясь на данные магнитометра, и рулей высоты. Имея данные о направлении движения лодки и ее угол наклона в момент погружения и всплытия, можно добиться оптимальной траектории при перемещении лодки».
💬 «Лодка имеет два основных варианта управления.
1. Режим автоматического управления подстраивает поверхности управления на заданный угол погружения/всплытия, а так же удерживает заданный курс. Такой режим задается при активации лодки при помощи пульта управления, в дальнейшем без связи с пультом параметры автоматически выдерживаются.
2. Режим управления с пульта. Поверхности управления меняют углы поворота при помощи стиков на пульте управления и лодка полностью подчиняется действиям оператора пульта.
Программное обеспечение написано на языке C++».
💬 «Испытания проводились в естественном водоеме (река Волга). Лодка погружалась на глубину 1 метр и всплывала на поверхность. В ходе эксперимента была проверена герметичность конструкции, плавучесть и управляемость. Испытания прошли успешно. Слабым местом оказался канал радиообмена».

Этапы создания проекта
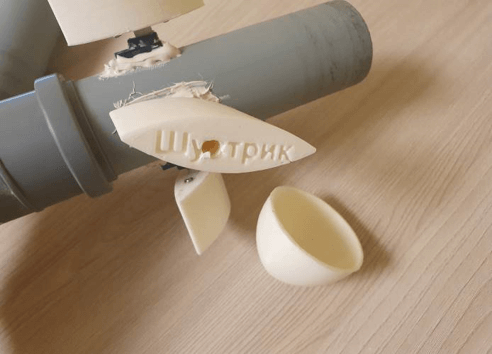
💬 «1. В трубу ПВХ были установлены сервомоторы, двигатель и электронный модуль».
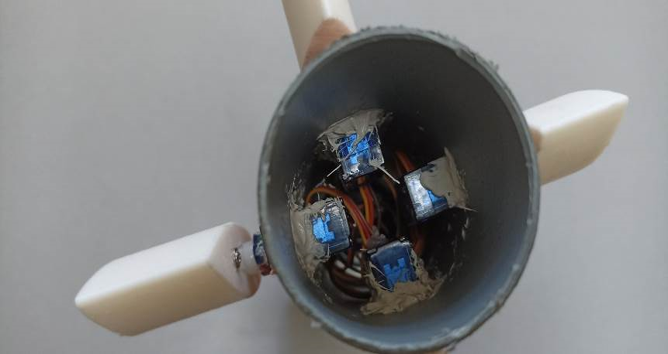

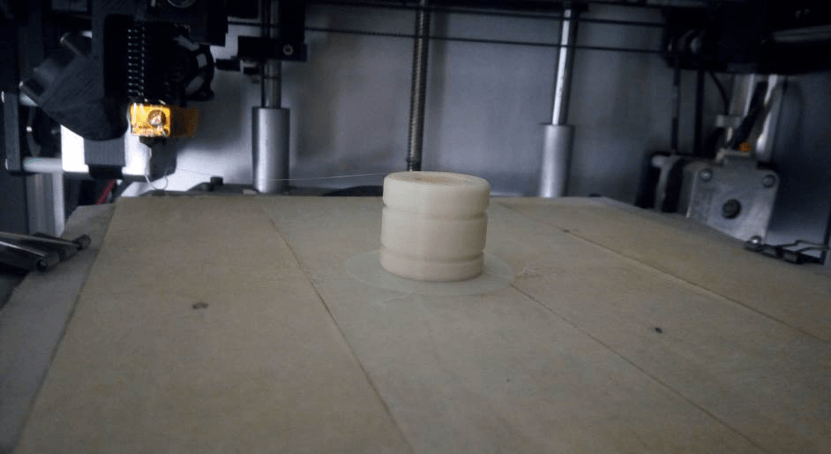
💬 «2. Поверхности управления, обтекатели носа и винта были разработаны в программе Fusion 360, затем напечатаны на 3D принтере.
3. Сервомоторы рулей направления и погружения были встроены в корпус лодки и загерметизированы с внешней и внутренней стороны».

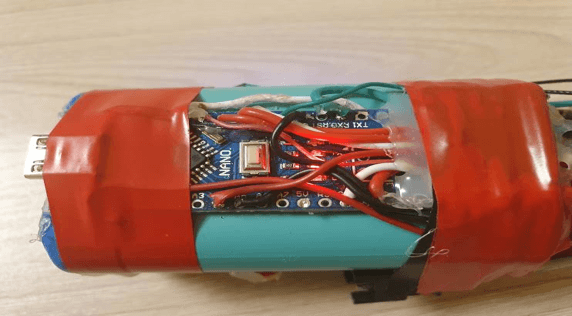
💬 «4. Источник питания был сформирован из трех элементов типа 18650 , собран в единый модуль и оснащен платой защиты /зарядки.
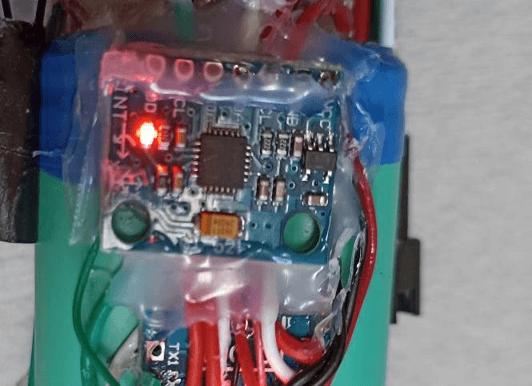
5. В качестве платы управления мы выбрали модуль Arduino Nano в силу его подходящих размеров.
6. К плате управления был подключен модуль радиообмена.
7. В схему управления был встроен шестиосевой гироскоп-магнитометр для отслеживания углов поворота лодки относительно сторон света и угол наклона лодки при погружении и всплытии. Этот модуль позволяет строго соблюдать курс и угол».
💬 «8. Разработка модуля плавучести. В программе 3D моделирования Fusion 360 была разработана модель поршня. Далее на 3D принтере были напечатаны два поршня чуть меньше внутреннего диаметра модуля погружения. В них предусмотрены места для гайки, которая будет прочно закреплена в поршне и сможет выдержать усилия, возникающие при перемещении поршня и сдавливании воздуха в модуле плавучести».

💬 «Прикрепив резьбовую шпильку к сервомотору, поршень был закреплен на шпильке, в предусмотренные канавки были установлены сантехнические резиновые уплотнители. Теперь поршень герметично располагается в трубе модуля погружения и не пропускает забортную воду к механизмам сервомоторов».

Желаем Юлии и Александру удачи в дальнейшем продвижении своего проекта!

© Всероссийский конкурс ШУСТРИК 2013‑2026 гг.
(школьник, умеющий строить инновационные конструкции)
 ㅤ
ㅤ
авторизуйтесь